CDC portal
Saving enormous amount of hand or arm related accidents in respective industries.
Its a gesture base robotic arm capable of moving as a normal human hand does, by using image processing and machine learning. The robotic arm consists of 21 joints thus able to perform movement 90% accurate to human hand movement.
Main goal is to provide a prosthetic arm to workers in industries so they can be safe from hazardous activities such as fixing short circuits, managing sharp machinery.
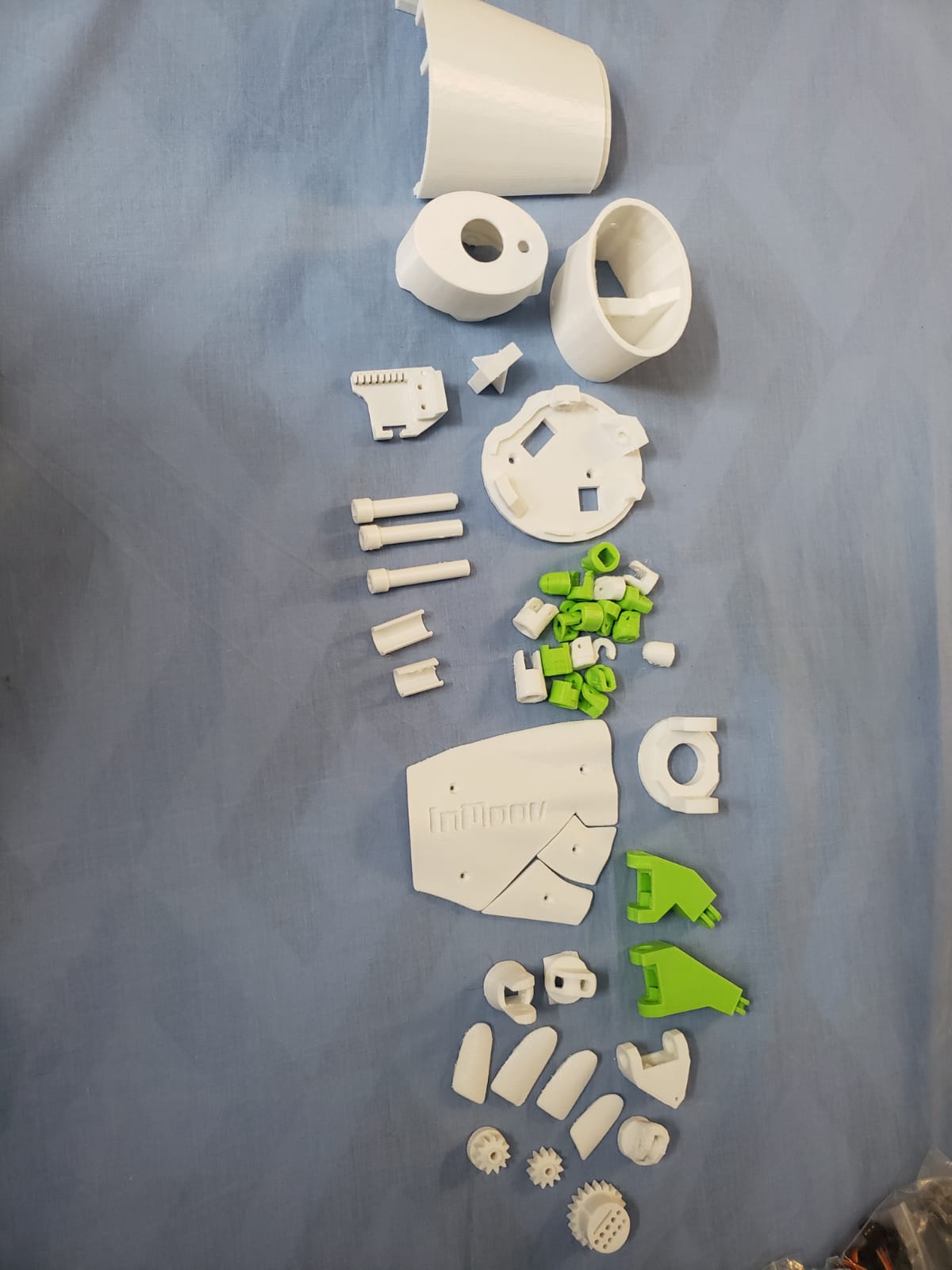
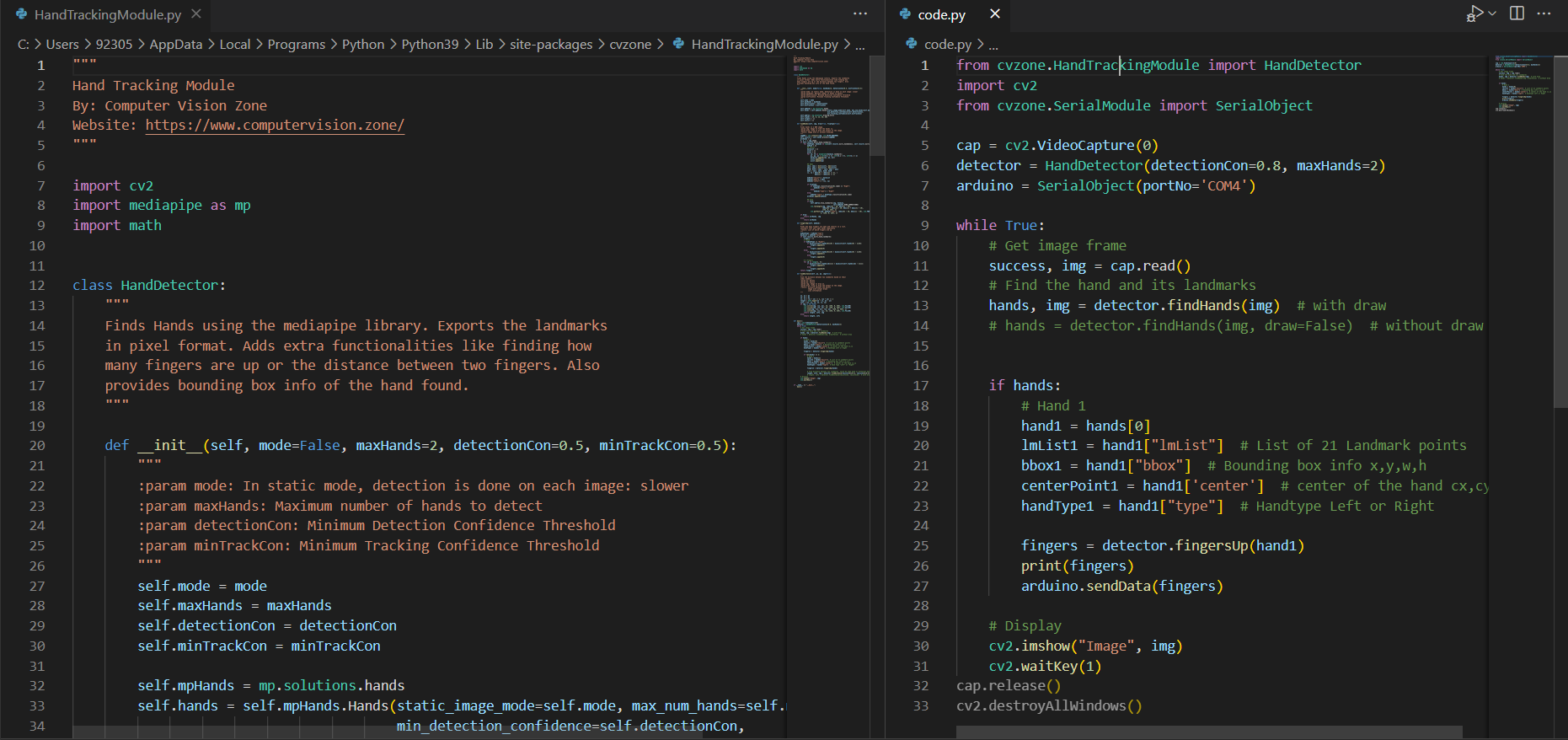
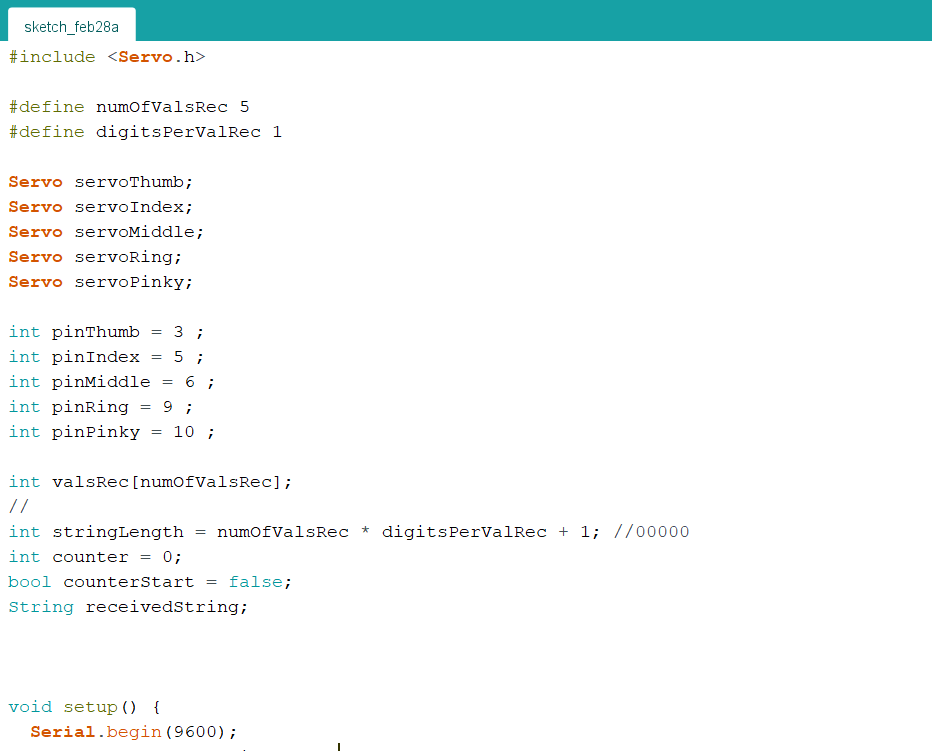
We are going to make a Image processing Gesture based robotic arm, capable of performing unlimited tasks from your hand. For working of hand model , a webcam will be used to capture different frame points from a video and using key points of hands and 3 model of arm will work on the basis on the video generated. For software program we will be using C++, python and for detecting of object we will use image processing, open CV. Robotic arms are machines that are programmed to execute a specific task or job quickly, efficiently, and extremely accurate. Generally motor-driven, they’re most often used for the rapid, consistent performance of heavy and/or highly repetitive procedures over extended periods of time, and are especially valued in the industrial production, manufacturing, machining and assembly sector.
A great many smaller robotic arms used in countless industries and workplace applications today are benchtop-mounted and controlled electronically. Larger versions might be floor-mounted, but either way they tend to be constructed from sturdy and durable metal (often steel or cast iron), and most will feature between 4-6 articulating joints. However our model will be made using 3-D printing, the key joints on a robotic arm are designed to closely resemble the main parts of its human equivalent - including the shoulder, elbow, forearm and wrist.
Project Objectives
Main Objective of our project is to save human lives by making the robotic arm do work as similer to humans.
It wil also help in repeitive work , thus saving much human energy and labor.
Its a big life saving step for electrical industries, by saving people from short circuits etc
Benefits of the Project
This project will provide:
Assistance in elctrical field regarding short circuits or hazerdous wires and hardware.
Helps in labor regarding repetitive work, thus saving man-power.
The amount of deaths and accidents will be decreased rapidly in concerened industries.
Technical Details of Final Deliverable
This project will deliver following:
- Gesture based robotic arm.
- Capable of working by analyzing human hand real time movement.