The Robotic technology is a way to reduce the agriculture dependency on herbicides as well as to increasing yield. As labor costs, more time to remove weeds manually by hand is unfavorable. The autonomous weed Skewer contains an actuator that will be used to mechanically remove weeds instead of the old conventional methods. The Detection and identification of weeds under field, is an extreme challenge. Our system “learns” the difference between the weeds and crops.
1.4 Significance of the System
Autonomous weed skewer is designed with an aim toward the automation of agriculture's non-mechanized and drudging tasks, hand weed control. The Weed skewer system the plant detection and classification between crop and weeds presented the greatest technical challenge for development. These challenges were suspected a quite difficult task which is usually done by labors in high prices which is not in reach of every farmer.
• The project “Autonomous Weed Skewer” will be designed with a purpose to provide ease of task to the farmer community by reducing hand labor and/or pesticide requirements.
• This project will help to accommodate the costs given to labors for hand weeding control.
• Furthermore, it helps to detect weeds in crops where human may do some mistake as is quite a difficult task.
• The project will enable to help in all situations to perform quick weed removal actions to save as many crops as possible.
• This project is a small development towards weeds removal with low cost, but different other techniques can be adopted to enhance the working capabilities of this system to meet requirements.
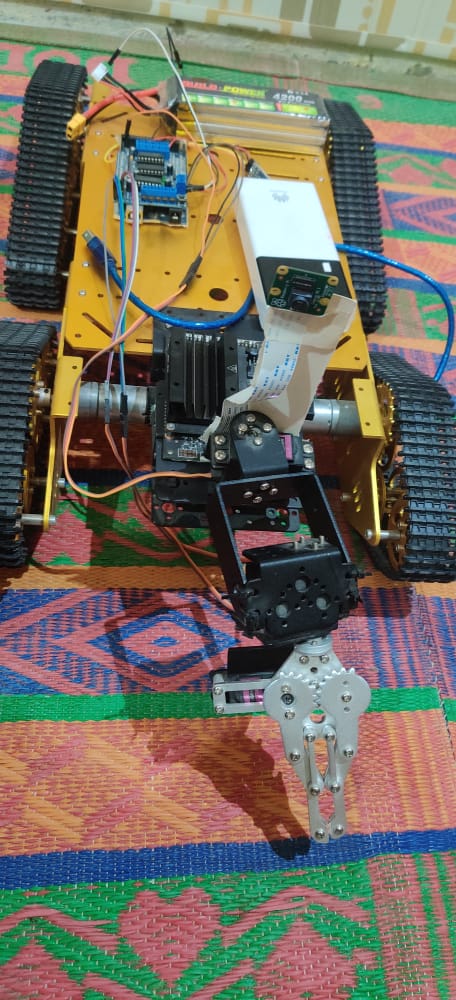
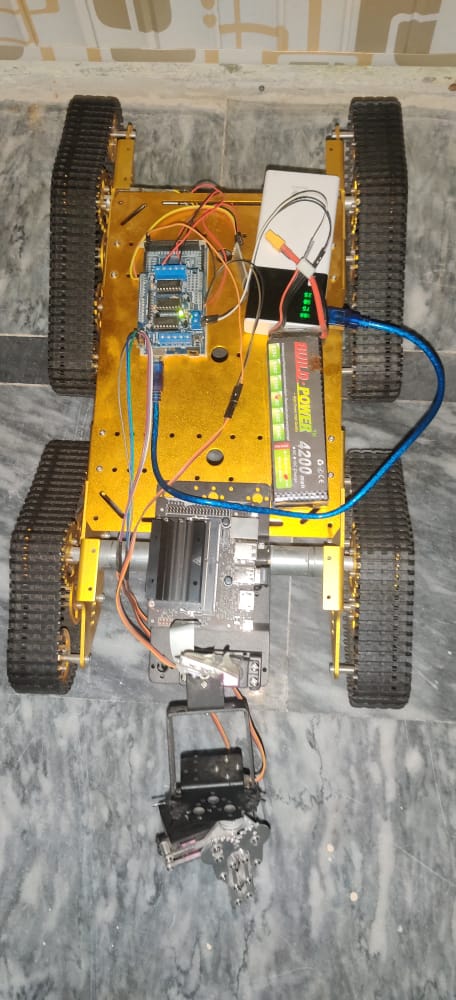
The project is consisted of a robot tank and App that controls movement of tank.
The major function that are going to be performed are as follows.
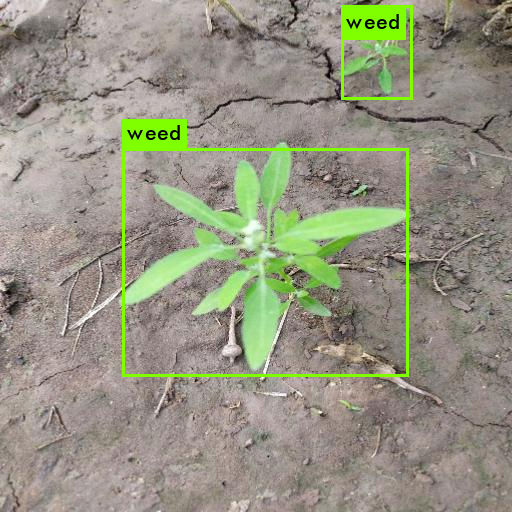
? Detect the presence of any weeds being using Camera in Sesame Crop.
? Control the robot movement via Mobile App.
? To perform image processing to detect the weed.
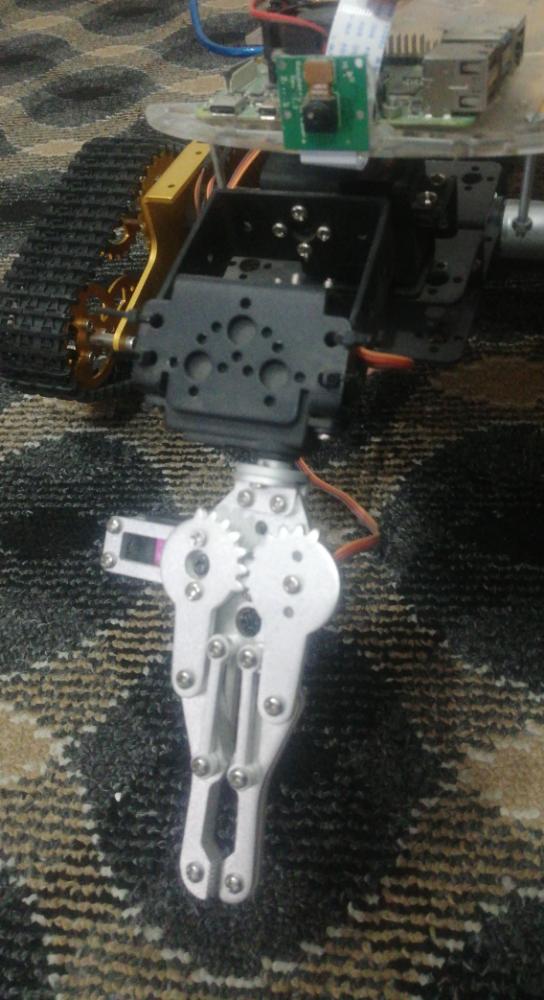
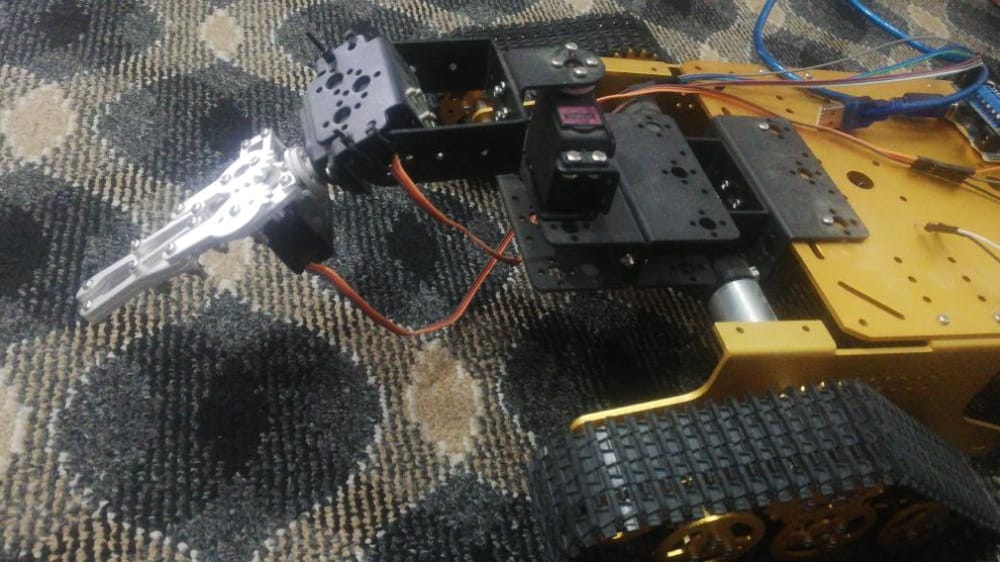
? Autonomously removal of the detected weeds by robotic arm.