1. A robotic arm is an electrical and mechanical machine that is used to perform tasks that require extreme precision and accuracy.2. The Arm contains multiple joints that act as axes that enable a degree of movement.3. The higher the joints more freedom it has.4. It can be used to perform both simple and complex repetitive tasks.
Objectives
1. Recognize Speech Commands:
The speech recognition model will monitor the surrounding in real-time to look for commands.
2. Integration with the model:
Integrate the robotic arm with voice command functions that will give it more flexibility when used in different applications.
3. Precision and Accuracy:
Achieve high precision and accuracy as they are crucial when handling delicate tasks or when working in precise manufacturing processes.
Socio-Economic Benefit
• Career Development: Assists job seekers
• Enhanced Efficiency: Increase in productivity and efficiency.
• Adaptability: More features can be added through the use of user feedback which will in turn make the product more desirable.
• User-Friendly : User friendly interface ensures ease of use and maximum utilization of system.
• To help the handicapped people that have special needs by providing them with a way to perform there day to day tasks.
• Ease of use: As the system can be used by any layman citizen.
Methodologies
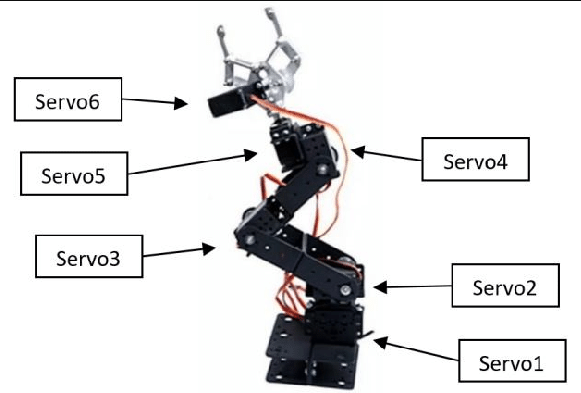
• System design: In order to have the highest freedom for the Robotic Arm. The Arm has a design which revolves around using 6 different joints. This design is commonly known as 6DOF.
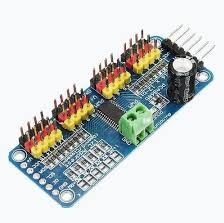
• Algorithm development: The step by step procedure of this system is that it will first pick up and analyze the surrounding and then refer back to the list of the program to check whether or not any match has been detected if no match is found it will go back to listening mode. If a match is found it will then generate a signal that is tailored to the match and the signal generated will go to the PWM controller to which will then control the movement of the arm using the motors.
• Build a Working Speech Recognition Model: The speech recognition model is an offline model so that the system can be standalone unit. The model used is Vosk which works using the probabilistic model for speech recognition.
• Integrate the Robotic Arm with the model and Run extensively: Integrate the developed speech recognition model with the robotic arm system and extensively test its functionality. This includes validating the accuracy of speech recognition, responsiveness of command execution, and overall performance of the integrated system.
• Debug or Troubleshoot: Identify and resolve the error that are found while testing the arm.
Outcome
• A Robotic Arm that is voice controlled will listen and perform tasks that it has being given using Speech Recognition.
• Precise Movement when handling delicate tasks or working in precise manufacturing processes.