A Robotic Gripper is a smart Robotic Arm that picks industrial objects and places them at a specified location. There is no need for a driver or manual control here as this Robotic Gripper is Artificially Intelligence and trained to grip the desired object. For that reason, it is exceptional for industrial applications, as there won't be a need for any labor for small pick and drop work.
Objective: Our aim here is to make a Smart Robotic Gripper that can be introduced in Industrial Sector to make the pick and drop process more efficient. Instead of Labor for this small work, we will introduce these Robotic Arms that work on Artificial Intelligence to pick the desired objects and place them without personnel to manually control it. Furthermore, the future of this project lies in the Arcade games and sector which requires Intelligent Machine Power to substitute human power or aid in it.
Benefits: The Smart Robotic Gripper works on the concept of introducing Intelligent Robotics in the Industrial Sector. Furthermore, it also plays a role in reducing the need for Labor at places where Robotics can be introduced for minute work.
Let us take the example of Amazon Warehouse where they introduced Smart Robotic Arms or Grippers to pick boxes and utilize the labor in places where human power is a must. It further reduces the need for labor at places where we can introduce Robotics and increases the wages of Labor at places where they are required.
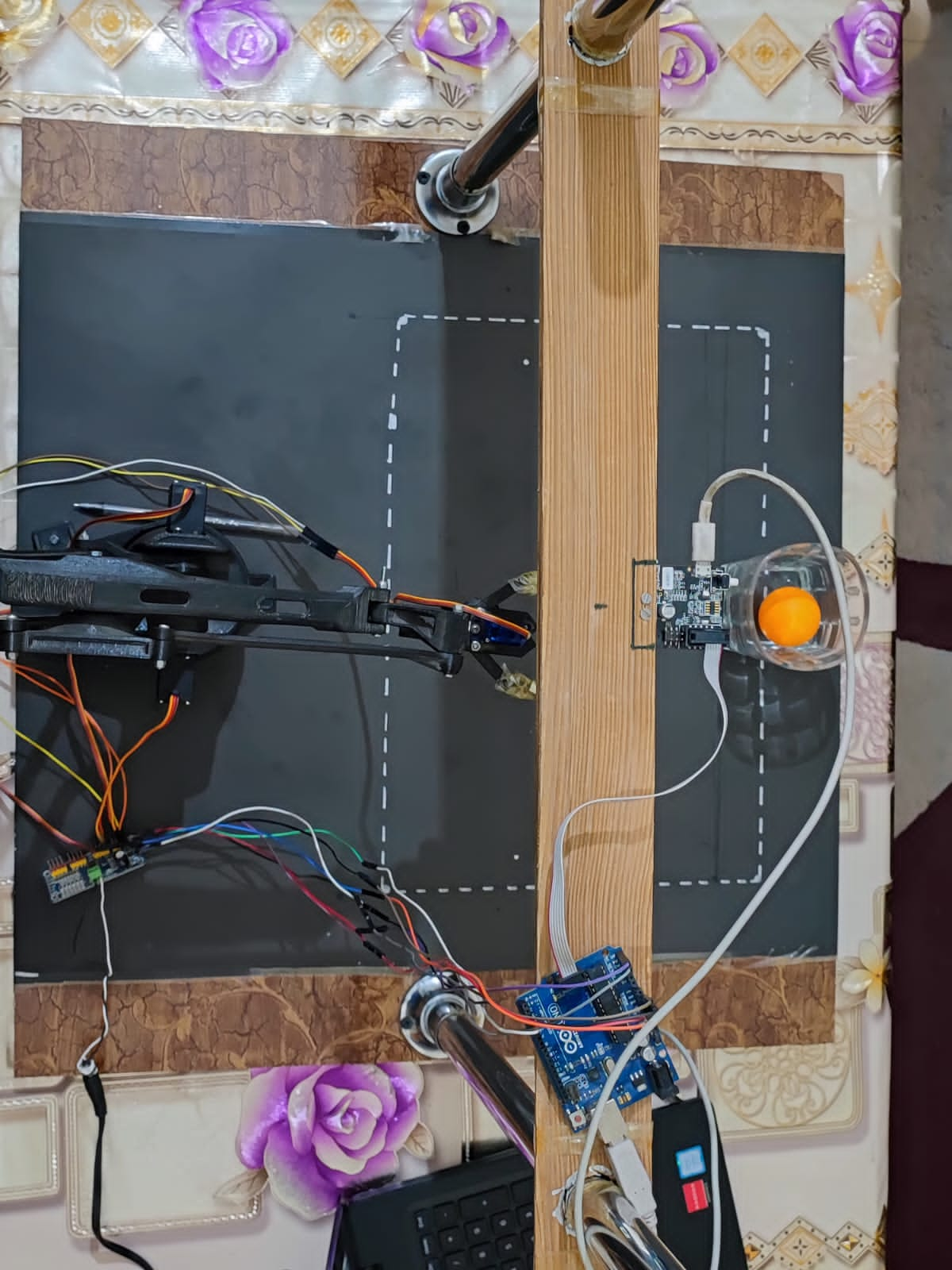
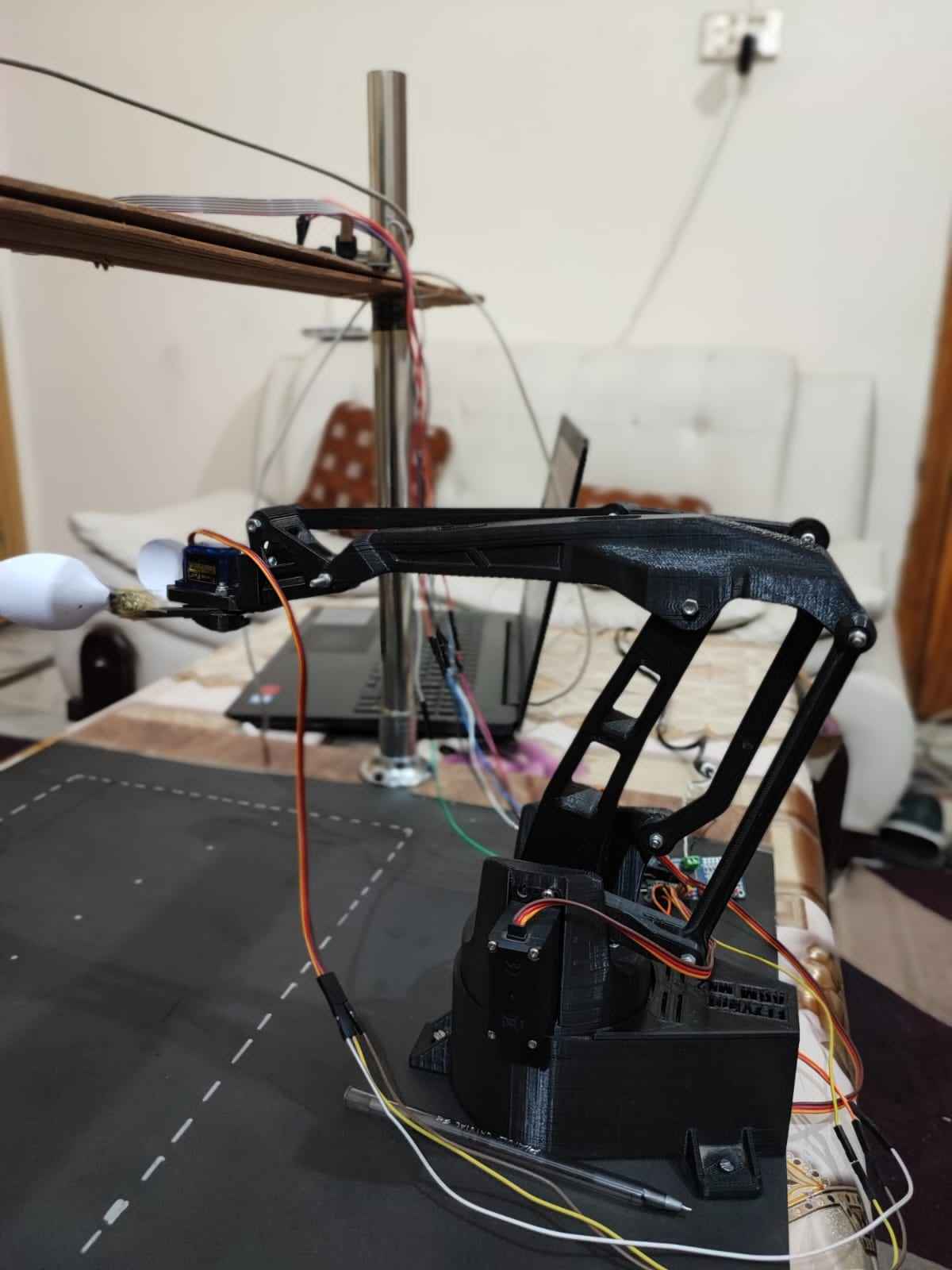
Methodology: We have Arduino as the Brains of the Project which combines Servo Motors with the Robotic Gripper and its Camera. The Eyes of the Robotic Gripper is its Pixy Cam and then we have Servo Motors that move the whole arm.
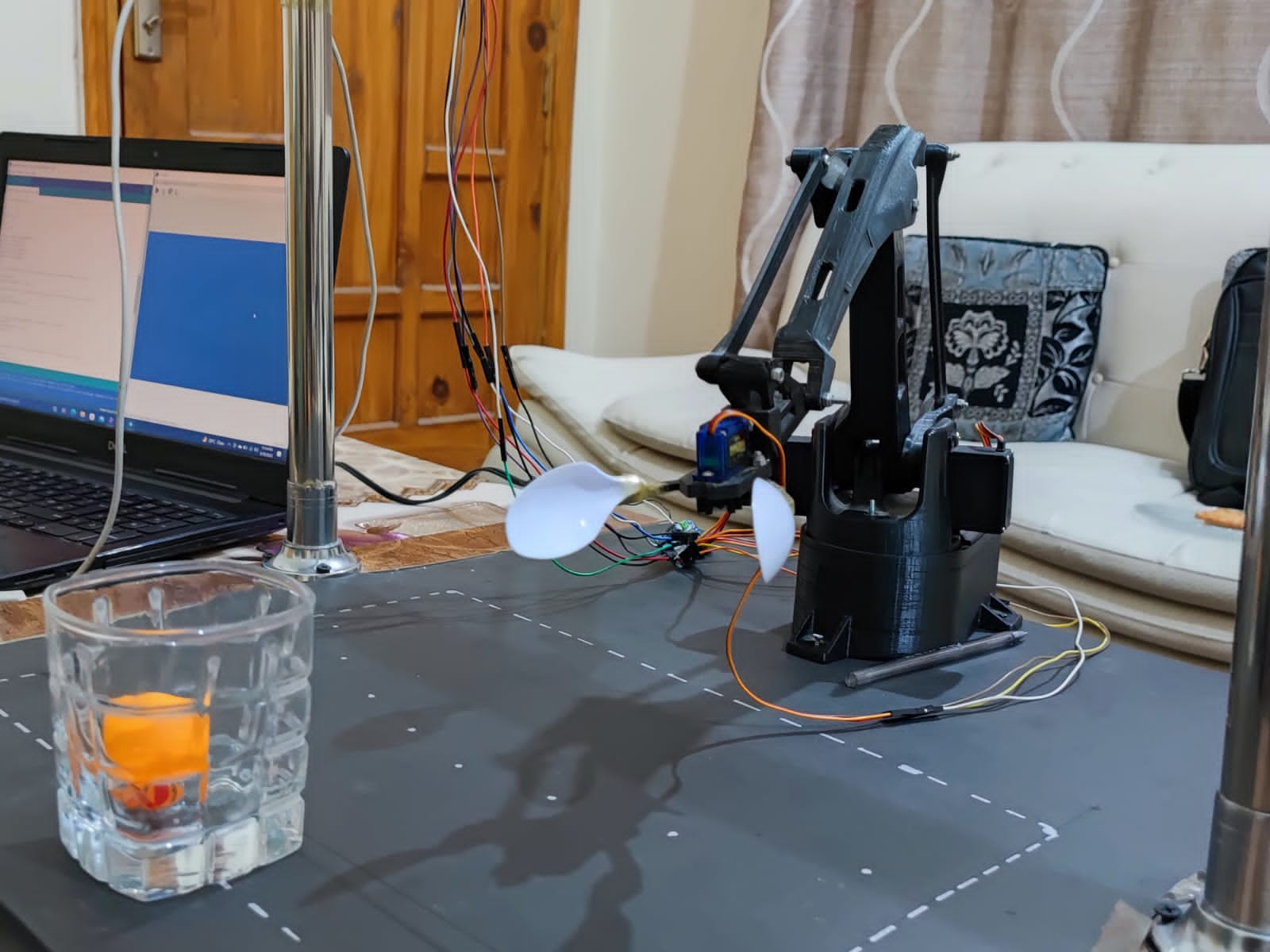
First of all, the Pixy Cam tracks the Ball and then the Servo Motors move the whole Arm to that location. The Gripper Picks the Ball and Moves to the Location of the Cup. Finally, the Robotic Arm throws the ball into the cup itself.
This is the Pick and Drop example that can further be trained to track objects in the industrial sector, pick them up and place them intelligently.
Outcome: Our main objective was to make an efficient Smart Robotic Gripper using Artificial Intelligence and Image Processing. We achieved the goal, as the Robotic Gripper tracks the ball at a specific point, picks it up, and then throws it inside the cup already present at a location. This is a representation of how the A. I Robotic Gripper will work in Industry for Pick and Drop.