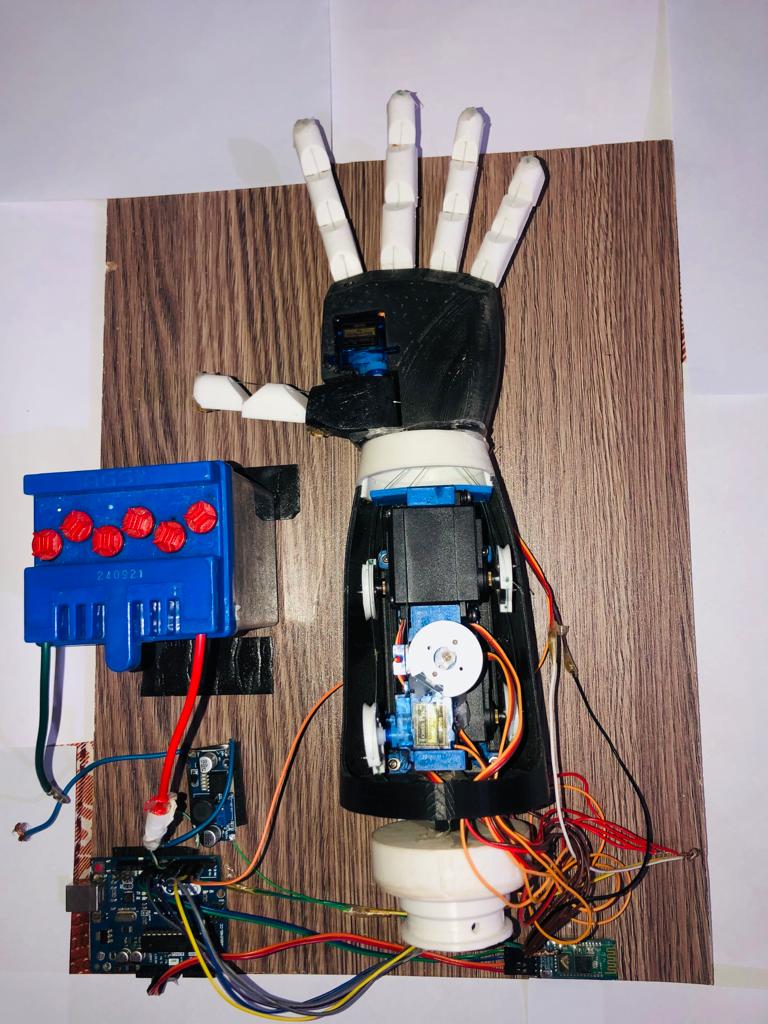
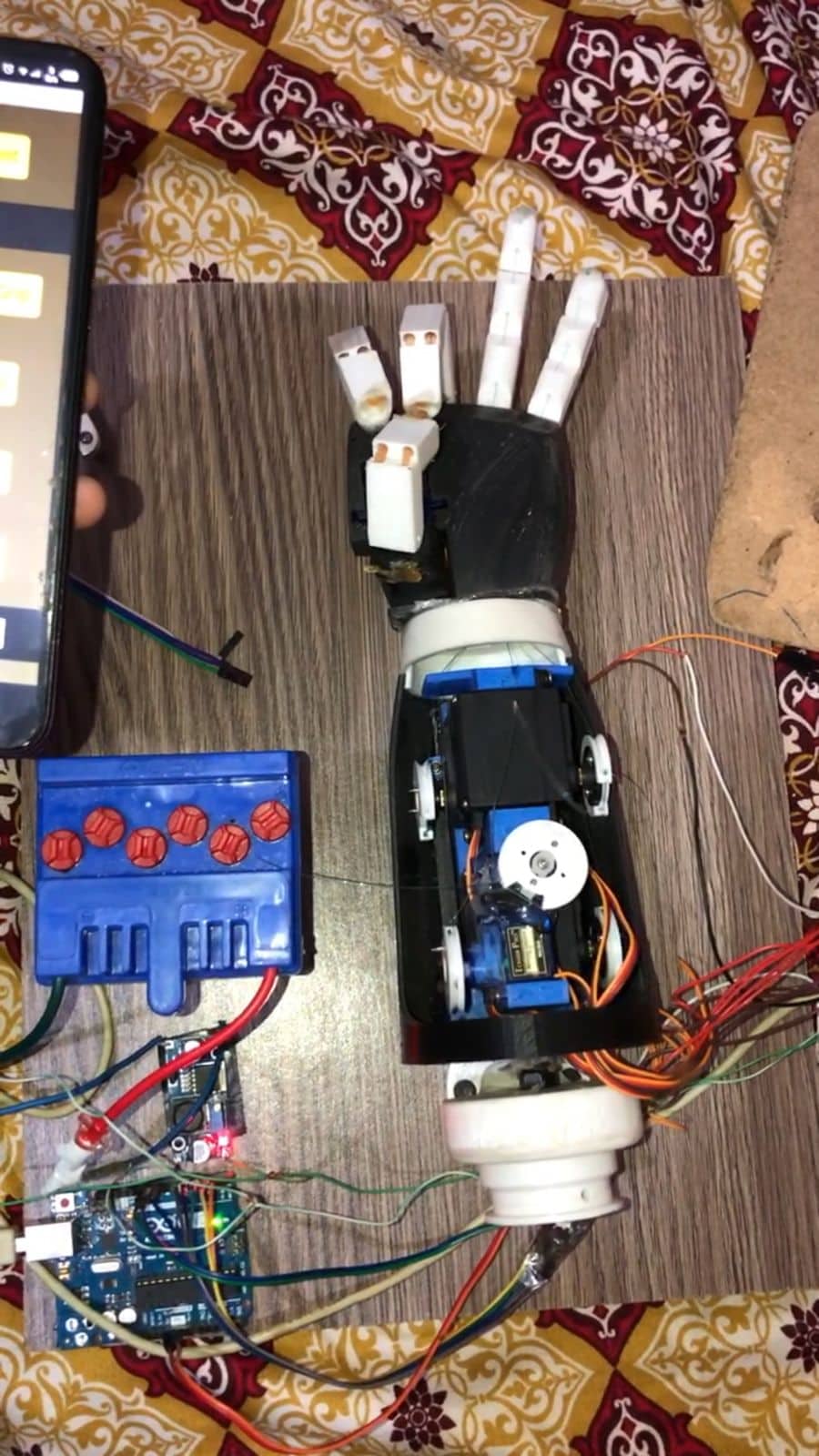
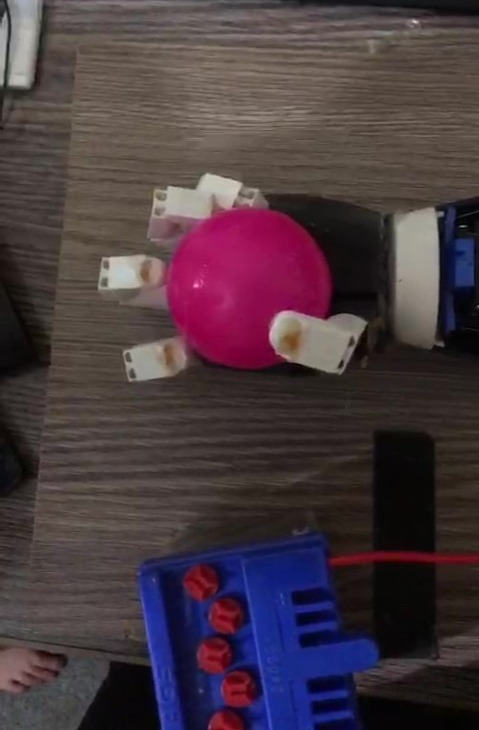
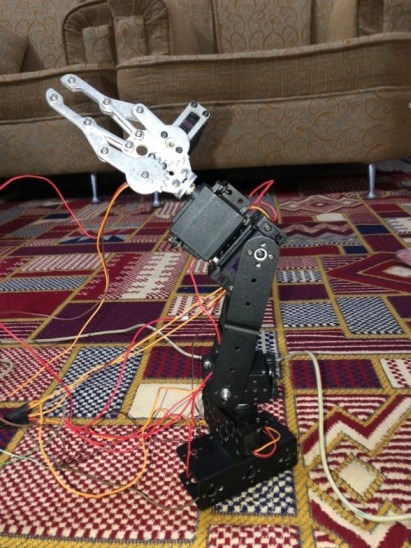
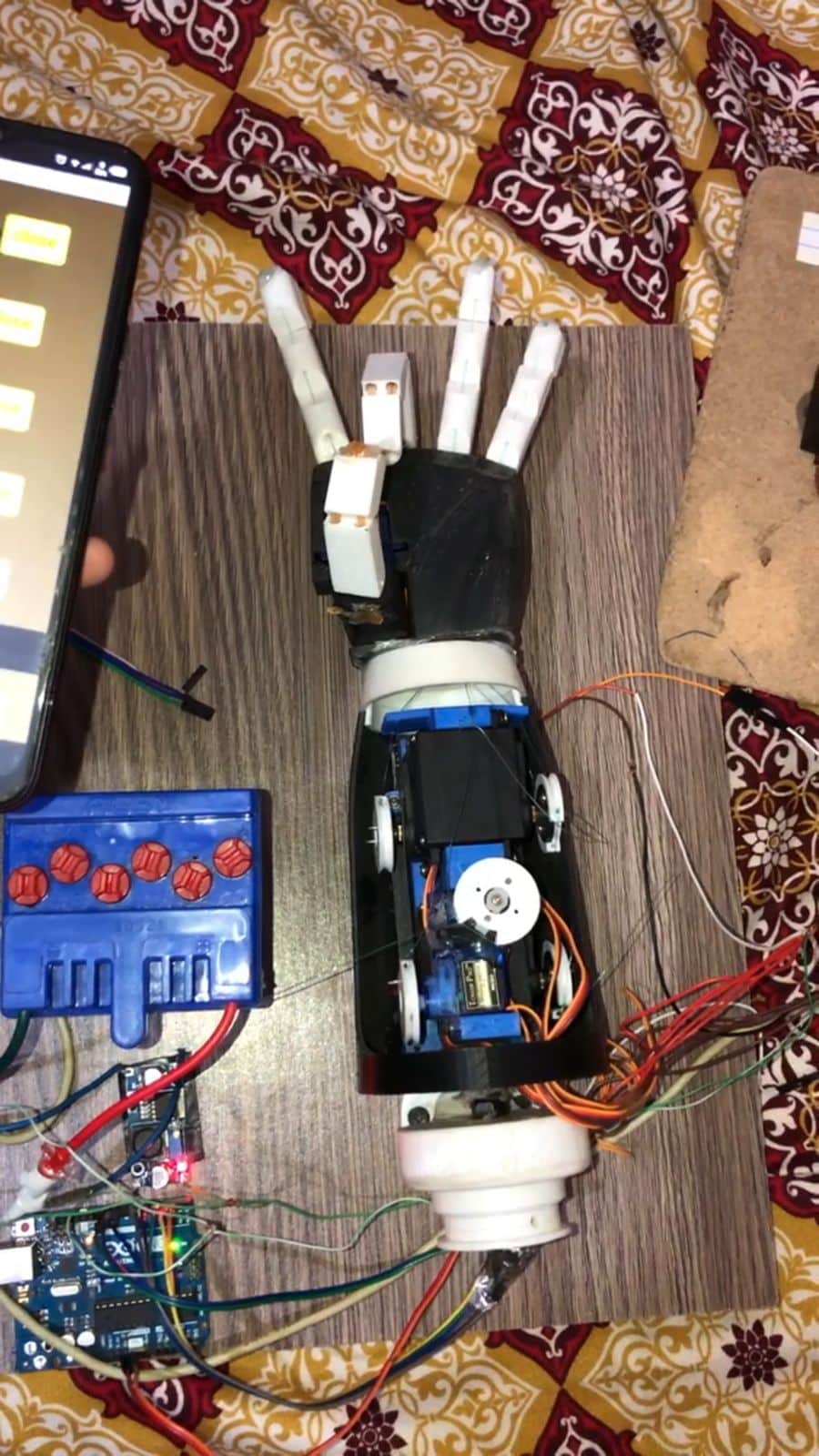
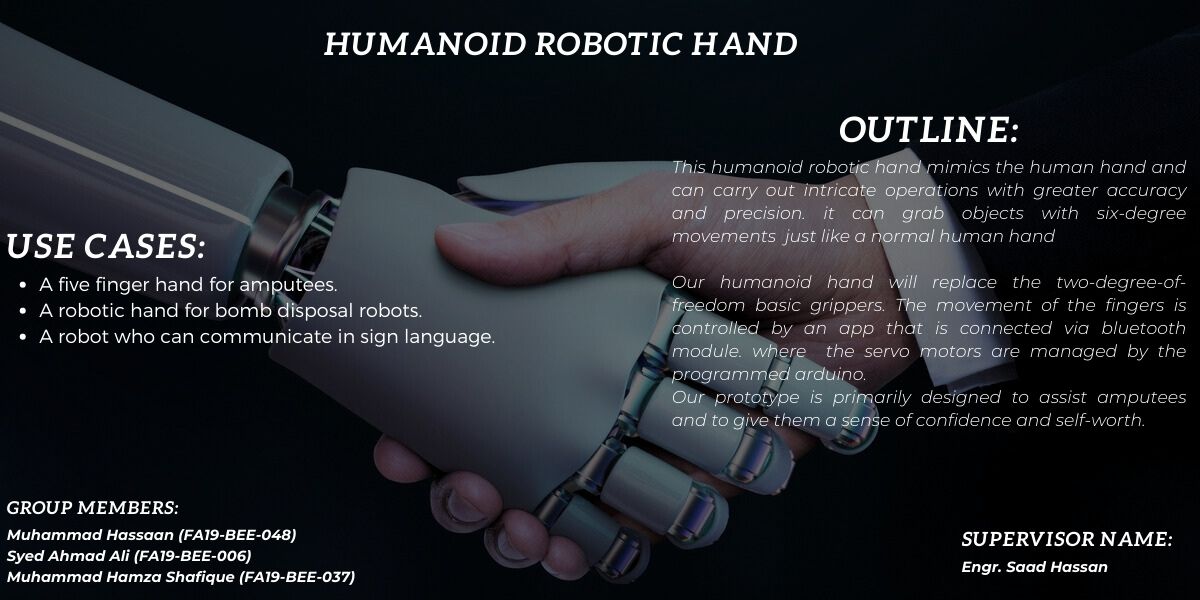
This humanoid robotic hand mimics the human hand and can carry out intricate operations with greater accuracy and precision. it can grab objects with six-degree movements just like a normal human hand.Our humanoid hand will replace the two-degree-of-freedom basic grippers. The movement of the fingers is controlled by an app that is connected via bluetooth module. where the servo motors are managed by the programmed arduino. Our prototype is primarily designed to assist amputees and to give them a sense of confidence and self-worth.
Objectives
1. Our main objective is to make 5 finger robotic hand having 6 degrees of freedom.
2. As six degree of freedom hand can easily do critical tasks precisely.
3. At this stage we have achieved 6 degree of motion which was our first and foremost objective.
4. Cost-effective, allowing the majority of amputees to purchase it.
Socio-Economic Benefit
Improved functionality: For people who have lost the use of their hands due to injury or loss, our robotic hand can carry out a variety of tasks with accuracy and precision.
Sign language interpretation: Our hand can mimic sign signals. Fundamental functions are fed into the app which then interprets hand signals.
Accessibility: This humanoid robotic hand will provide the amputees with independence and autonomy in their daily life.
Precision: Any task that a human hand can complete, it can do with great accuracy and precision.
Improved psychological well-being: Our robotic hand will make it easier for amputees to carry out daily tasks, which will boost their self-confidence. This will have a positive effect on their mental health as well.
Methodologies
The first step in creating the prosthetic hand was deciding on the best control mechanism for finger movement. Before deciding on the strategy, we believed to be the best, we experimented with several early designs. These ideas included a tension-controlled gadget, numerous intricate pulley systems, and a four-bar connection arrangement. However, at the end we landed on the method which included both tension and pulley system combined. We were having issues with the tension-controlled device and pulley system, but after doing some study, we discovered this solution by combining these two approaches.
Outcome
The final deliverable will be a six-degrees-of-freedom robotic hand which can imitate the human hand. The humanoid robotic hand is designed in such a way that it will mimic the natural movements of a human hand. Thus, increasing the quality of the everyday tasks for amputees. We are utilising the MIT App Inventor to create the app, the Arduino IDE for programming, and Fusion 360 for 3D modelling. The humanoid robotic hand is designed in such a way to efficiently impersonate the human hand making its performance quite satisfactory. After integration, we carried out a significant amount of testing to make sure we were getting the results we were looking for by validating the output and assessing its capacity to handle objects with six degrees of motion.