A cutting-edge technology that combines autonomous mobility and advanced image analysis. This innovative system enables UGVs to navigate and interact with their environment using real-time image processing algorithms, offering a wide range of applications in fields such as surveillance, search and rescue, and industrial automation.
Objectives
• Designing a robust and reliable UGV platform capable of autonomous mobility and navigation in various environments.
• Implementing real-time image processing algorithms to analyze visual data captured by the UGV's sensors, enabling intelligent perception and decision-making.
• Enhancing the UGV's ability to detect and recognize objects, patterns, and anomalies to support tasks such as surveillance, inspection, and monitoring.
• Integrating communication capabilities to enable seamless interaction between the UGV and human operators, facilitating remote control and data exchange.
• Validating and optimizing the UGV system through rigorous testing and evaluation, ensuring its practical applicability and scalability for diverse sectors including defense, public safety, and industrial automation.
Socio-Economic Benefit
• Enhanced safety and security through autonomous patrols and real-time threat detection.
• Improved efficiency and productivity by automating tasks traditionally done by humans.
• Cost savings by reducing the need for human resources in surveillance and monitoring.
• Accelerated response times in critical situations, such as search and rescue operations.
• Expanded industrial automation capabilities for streamlined operations and increased output.
Methodologies
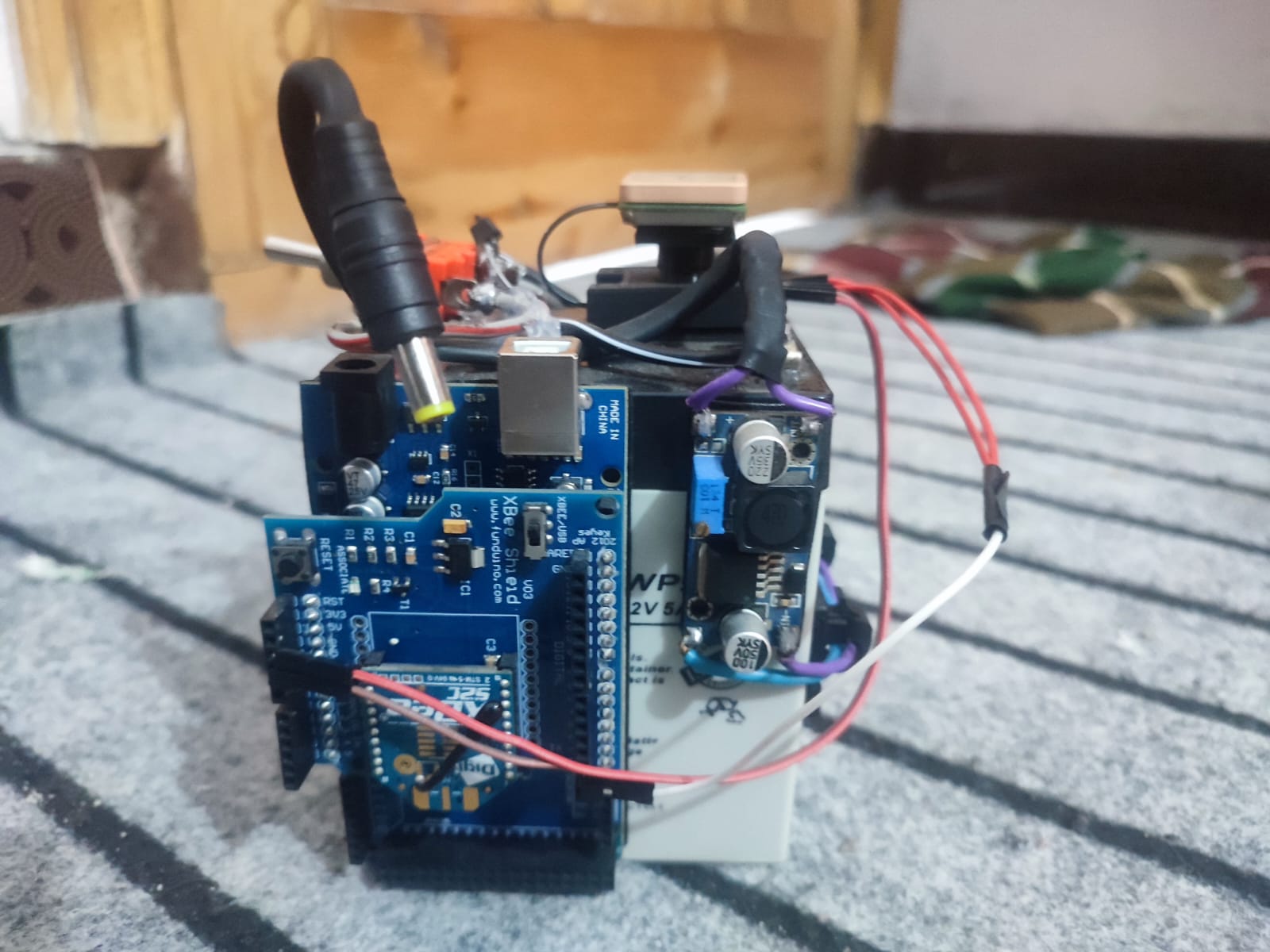
In this project firstly we Made some 3D CAD designs and then we selected the most suitable from them. Designing and analysis is the first step of our project.
Secondly, we develop a system for our UGV by integrating different sensors in order to work properly. The base station is used as a destination point whereas a receiver is installed on the UGV to guide it to its destination.
And at last, we developed an algorithm for image processing using Python and Raspberry Pi as microcontrollers.
Outcome
Object Detection and Recognition: Enable UGVs to identify and classify objects in their surroundings, ensuring safe navigation and informed decision-making.
Autonomous Navigation: Utilize image processing to extract relevant information from camera images, allowing UGVs to navigate autonomously by recognizing road markings, signs, and landmarks.
Environmental Monitoring: Employ image processing to analyze captured images and sensor data, facilitating tasks such as vegetation health assessment, wildfire detection, and pollution source identification.
Surveillance and Security: Leverage image processing algorithms to monitor live video feeds or recorded footage, enhancing UGVs' ability to detect suspicious activities, monitor restricted areas, and track objects or individuals.
Object Manipulation and Interaction: Utilize image processing techniques to enable UGVs to locate and interact with objects, performing tasks like grasping, picking, and placing objects accurately.