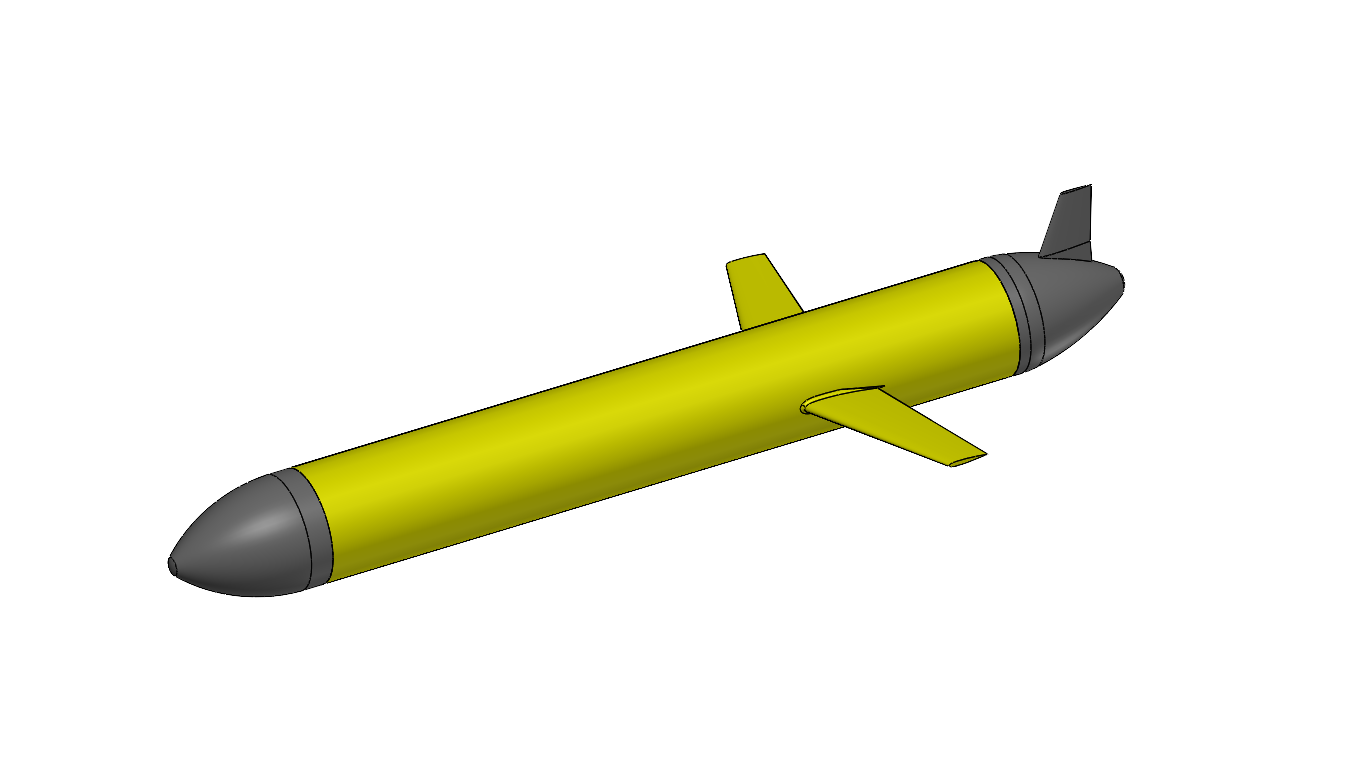
This project involves the design and development of a buoyancy-driven underwater glider aimed at achieving energy-efficient, long-range autonomous underwater navigation by preprogrammed microcontroller. By utilizing a variable buoyancy control mechanism, the glider performs vertical motion that is converted into horizontal glide using hydrodynamic wings. The system is optimized for minimal energy consumption, long-duration deployment, and real-time data collection.
Objectives
1. To design and fabricate a compact, cost-effective underwater glider prototype capable of buoyancy-driven propulsion and autonomous underwater movement.
2. To develop a reliable buoyancy control mechanism
3. To model and simulate the glider’s hydrodynamic behavior and stability using CAD and simulation tools (e.g., SolidWorks, ANSYS).
4. To integrate onboard sensors (depth, temperature, orientation) for environmental data collection and navigation feedback.
5. To implement an embedded control system (based on Arduino Mega 2560) for real-time control, data logging, and navigation.
6. To test the glider’s performance in a controlled water environment, validate its functionality, and analyze its motion profile.
Socio-Economic Benefit
The development of this low-cost, autonomous underwater glider provides significant socio-economic advantages. It enables affordable access to marine data collection for educational institutions, researchers, and environmental agencies, reducing dependence on expensive, imported oceanographic equipment. This project fosters local innovation in underwater robotics and sensor integration, promoting skill development in engineering, automation, and marine sciences. It also opens new opportunities for small-scale industries to participate in the design and manufacturing of marine technologies. In the long term, such projects contribute to better coastal resource management, disaster preparedness, and sustainable exploration of marine ecosystems, thereby supporting both environmental protection and the blue economy.
Methodologies
• Conceptual Design
Based on functional requirements, a conceptual design was developed using the NACA 0012 airfoil for wings, a modular body structure, and a buoyancy engine using syringes or a bladder system.
• Hydrodynamic Analysis
Wing parameters such as root chord, tip chord, taper ratio, and thickness were finalized using basic aerodynamic principles and aspect ratio calculations to ensure efficient gliding with minimal drag.
• CAD Modeling and Simulation
The glider body, wings, and internal components were modeled in SolidWorks. Simulations (e.g., lift and drag analysis) were conducted to validate design assumptions.
• Prototype Development
A prototype is built using rapid prototyping techniques such as 3D printing for wings and internal supports. The outer body is made of carbon fiber. The design followed a modular approach for easy assembly and part replacement.
• Buoyancy Engine Integration
Syringe-based buoyancy control systems were implemented to simulate ascent and descent. Volume displacement calculations were used to determine the number of syringes needed for neutral buoyancy.
• Control System and Electronics
The Arduino Mega 2560 microcontroller was used to automate buoyancy adjustments, collect depth data via a pressure sensor, and log sensor outputs. A limit switch and optional pitch-roll modules were integrated for stability and feedback.
• Testing and Validation
The prototype was tested in a controlled water tank to verify buoyancy control, wing glide efficiency, and stability. Results were compared with design predictions, and necessary adjustments were made.
Outcome
The project resulted in the successful design and development of a small-scale autonomous underwater glider featuring a modular structure and a NACA 0012-based wing design. A buoyancy control system using syringes or a bladder was integrated and automated using an Arduino microcontroller, enabling controlled ascent and descent. The glider was built using low-cost 3D-printed components and tested in a water tank, where it demonstrated stable gliding and effective depth control.